文章目录
1 前情提要
2 灵感来源
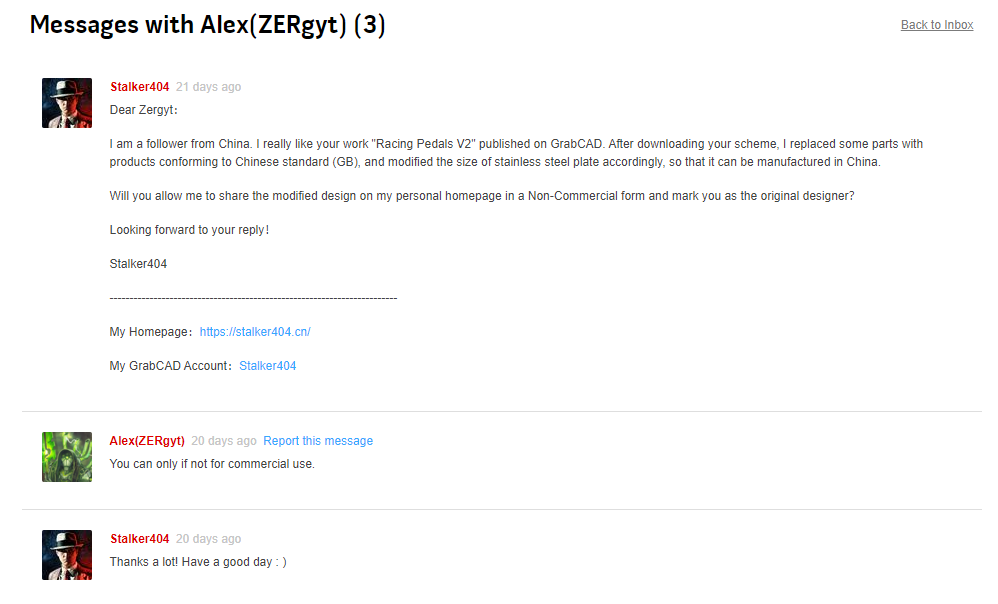
- 俄罗斯大神Alex(ZERgyt)在GrabCAD上分享的模拟踏板组设计方案:https://grabcad.com/library/pedals-v2-1
- Youtube博主GP Race Simulation分享的Make your own Load Cell Pedals for Sim Racing系列视频:https://youtu.be/DarnIy6LnNo
3 踏板加工图纸
经过Alex大神的同意,我可以以非商业形式将修改后的图纸分享在个人主页
全部加工图纸包括:
- 完整的零件清单
- 金属切割CAD排版图(含钣金和沉孔说明)
- PCB电路板Gerber文件
- 全部3D打印件STL模型
下载地址:
蓝奏云:https://wwc.lanzouj.com/id80Y04oqpej
4 三维模型图
STEP格式,用于安装时的参考说明
蓝奏云:https://wwc.lanzouj.com/i2lzD04opfih
5 踏板原始值获取程序
主要作用是获取踏板的原始值,把各个踏板在完全释放和完全踩下时的值记录下来,用作出厂标定值输入到踏板组程序中。

//调用库来自:https://github.com/bogde/HX711
#include <HX711.h>
/*
定义称重传感器(刹车)相关参数
calibration_factor 称重传感器标定系数
DOUT 数据引脚
CLK 时钟引脚
*/
#define calibration_factor 100
#define DOUT 1
#define CLK 0
/*
定义油门(Throttle)参数
T_PIN 模拟电压量输入引脚
*/
#define T_PIN A3
/*
定义离合(XAxis)参数
C_PIN 模拟电压量输入引脚
*/
#define C_PIN A2
//创建Loadcell类,以阻塞模式启动
HX711 Loadcell;
//声明各踏板所需的变量
long int Brake_ = 0;
int Throttle_ = 0;
int Clutch_ = 0;
String All_OutPut = "0";
void setup() {
//设置HX711使用的引脚
Loadcell.begin(DOUT, CLK);
//载入称重传感器标定数据
Loadcell.set_scale(calibration_factor);
Loadcell.tare();
}
void loop() {
//读取称重传感器数据作为刹车值,若原始变量为负值,则需要使用负号: -Loadcell.get
Brake_ = Loadcell.get_units();
//将离合值传入离合摇杆(XAxis)
Clutch_ = analogRead(C_PIN);
//将油门值传入油门摇杆(Throttle)
Throttle_ = analogRead(T_PIN);
delay(10);
//将三个踏板的原始值输出到串口
All_OutPut = String("Throttle ") + String(Throttle_) + String("\tBrake ") + String(Brake_) + String("\tClutch ") + String(Clutch_);
Serial.println(All_OutPut);
}
6 踏板组程序
将三个踏板作为游戏手柄接入Windows系统
//调用库来自:https://github.com/bogde/HX711
#include <HX711.h>
//调用库来自:https://github.com/MHeironimus/ArduinoJoystickLibrary
#include <Joystick.h>
/*
定义称重传感器(刹车)相关参数
calibration_factor 称重传感器标定系数
DOUT 数据引脚
CLK 时钟引脚
SCALE_MIN HX711最小输入量(完全释放时的原始值)
SCALE_MAX HX711最大输入量(完全踩下时的原始值)
B_MIN 刹车踏板下限值
B_MAX 刹车踏板上限值
*/
#define calibration_factor 100
#define DOUT 1
#define CLK 0
#define SCALE_MIN 0
#define SCALE_MAX 7000
#define B_MIN 0
#define B_MAX 4096
/*
定义油门(Throttle)参数
T_PIN 模拟电压量输入引脚
T_INPUT_MIN 油门传感器最小模拟量(完全释放时的原始值)
T_INPUT_MAX 油门传感器最大模拟量(完全踩下时的原始值)
T_MIN 油门踏板下限值
T_MAX 油门踏板上限值
*/
#define T_PIN A3
#define T_INPUT_MIN 263
#define T_INPUT_MAX 487
#define T_MIN 0
#define T_MAX 255
/*
定义离合(XAxis)参数
C_PIN 模拟电压量输入引脚
C_INPUT_MIN 离合传感器最小模拟量(完全释放时的原始值)
C_INPUT_MAX 离合传感器最大模拟量(完全踩下时的原始值)
C_MIN 离合踏板下限值
C_MAX 离合踏板上限值
*/
#define C_PIN A2
#define C_INPUT_MIN 255
#define C_INPUT_MAX 545
#define C_MIN 0
#define C_MAX 255
//创建Loadcell类,以阻塞模式启动
HX711 Loadcell;
//创建Joystick类,定义外设类型和各轴启用状态
Joystick_ Joystick(0x04, JOYSTICK_TYPE_JOYSTICK, //HID设备ID设置为0x04 | 外设类型设置为Joystick(摇杆)
0, 0, // 0个按钮 | 0个切换开关
true, false, false, // X轴扳机启用 | Y轴扳机禁用 | Z轴扳机禁用
false, false, false, // X轴旋转禁用 | Y轴旋转禁用 | Z轴旋转禁用
false, true, // 脚舵禁用 | 油门启用
false, true, false); // 加速器禁用 | 刹车启用 | 方向盘禁用
//声明各踏板所需的变量
int Brake_ = 0;
int Throttle_ = 0;
int Clutch_ = 0;
void setup() {
//初始化Joystick库
Joystick.begin(false);
//设置各轴区间
Joystick.setThrottleRange(T_MIN, T_MAX);
Joystick.setBrakeRange(B_MIN, B_MAX);
Joystick.setXAxisRange(C_MIN, C_MAX);
//设置HX711使用的引脚
Loadcell.begin(DOUT, CLK);
//载入称重传感器标定数据
Loadcell.set_scale(calibration_factor);
Loadcell.tare();
}
void loop() {
//读取称重传感器数据作为刹车值,若原始变量为负值,则需要使用负号: -Loadcell.get
Brake_ = Loadcell.get_units();
if(Brake_ < SCALE_MAX * 0.01) //小于1%时置0,防止刹车跳动
{
Brake_ = 0;
}
Brake_ = map(Brake_, SCALE_MIN, SCALE_MAX, B_MIN, B_MAX); //值映射
Joystick.setBrake(Brake_);
//将离合值传入离合摇杆(XAxis)
Clutch_ = analogRead(C_PIN);
Clutch_ = map(Clutch_, C_INPUT_MIN, C_INPUT_MAX, C_MIN, C_MAX); //值映射
//Clutch_ = C_MAX - Clutch_; //霍尔电压值反转,视磁铁布置方式而定
Joystick.setXAxis(Clutch_);
//将油门值传入油门摇杆(Throttle)
Throttle_ = analogRead(T_PIN);
Throttle_ = map(Throttle_, T_INPUT_MIN, T_INPUT_MAX, T_MIN, T_MAX); //值映射
//Throttle_ = T_MAX - Throttle_; //霍尔电压值反转,视磁铁布置方式而定
Joystick.setThrottle(Throttle_);
//更新状态,设置循环延迟10ms
Joystick.sendState();
delay(10);
}
7 预算详情
以下是我自己在制作时花费的资金明细,说实话也便宜不了多少,主要就是图一乐,体验一下折腾的乐趣。

该文章属于专题: DIY模拟赛车踏板
以下为同专题其他文章: